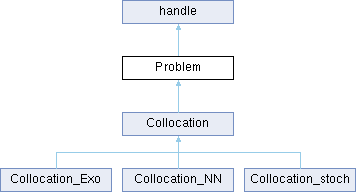
The abstract class for defining an optimization problem. More...
Public Member Functions | |
| virtual | confun (in obj, in X) |
| Abstract function to compute constraint violations at state vector X. | |
| function | derivativetest (in obj, in xr) |
| Function to test the whole problem which was defined. | |
| virtual | gradient (in obj, in g) |
| Abstract function to computing gradient at state vector X. | |
| virtual | jacobian (in obj, in X) |
| Abstract function to compute jacobian at state vector X. | |
| virtual | jacstructure (in obj) |
| Abstract function providing the jacobian pattern. | |
| virtual | objfun (in obj, in X) |
| Abstract function to computing objective value at state vector X. | |
| virtual | report (in obj, in X, in settings, in style, in resultFilename) |
| Abstract function to report a current state vector of the problem. | |
Static Public Member Functions | |
| static function | matcompare (in a, in b) |
| Helperfunction to compare matrices and mind maximum abs error. | |
Public Attributes | |
| Property | c_lb |
| Double array: Lower bound of constaints. | |
| Property | c_ub |
| Double array: Upper bound of constraints. | |
| Property | initialguess |
| Struct: Intial guess for x. | |
| Property | name |
| String: Name of result file. | |
| Property | X_lb |
| Double array: Lower bound of state vector. | |
| Property | X_ub |
| Double array: Upper bound of state vector. | |
Detailed Description
The abstract class for defining an optimization problem.
Member Function Documentation
◆ confun()
|
virtual |
Abstract function to compute constraint violations at state vector X.
Reimplemented in Collocation.
◆ derivativetest()
| function derivativetest | ( | in | obj, |
| in | xr | ||
| ) |
Function to test the whole problem which was defined.
◆ gradient()
|
virtual |
Abstract function to computing gradient at state vector X.
Reimplemented in Collocation.
◆ jacobian()
|
virtual |
Abstract function to compute jacobian at state vector X.
Reimplemented in Collocation.
◆ jacstructure()
|
virtual |
Abstract function providing the jacobian pattern.
Reimplemented in Collocation.
◆ matcompare()
|
static |
Helperfunction to compare matrices and mind maximum abs error.
Used for derivativetest()
◆ objfun()
|
virtual |
Abstract function to computing objective value at state vector X.
Reimplemented in Collocation.
◆ report()
|
virtual |
Abstract function to report a current state vector of the problem.
Reimplemented in Collocation.
Member Data Documentation
◆ c_lb
| Property c_lb |
Double array: Lower bound of constaints.
◆ c_ub
| Property c_ub |
Double array: Upper bound of constraints.
◆ initialguess
| Property initialguess |
Struct: Intial guess for x.
◆ name
| Property name |
String: Name of result file.
◆ X_lb
| Property X_lb |
Double array: Lower bound of state vector.
◆ X_ub
| Property X_ub |
Double array: Upper bound of state vector.
The documentation for this class was generated from the following file:
- BioMAC-Sim-Toolbox/src/problem/Problem.m